
💡 이 글은 ROS2에서 노드간의 통신의 변경점 및 DDS관련 용어 및 QoS 설정에 관한 내용이 포함되어 있습니다.
ROS2는 기본적으로 DDS Middleware를 사용한다. 다양한 DDS 혹은 RTPS 가 호환되는데 작성일 기준 호환되는 벤더는 아래와 같다.
- eProsima’s Fast DDS → Humble이 기본적으로 사용하는 DDS Middleware
- RTI’s Connext DDS
- Eclipse Cyclone DDS
- GurumNetworks GurumDDS
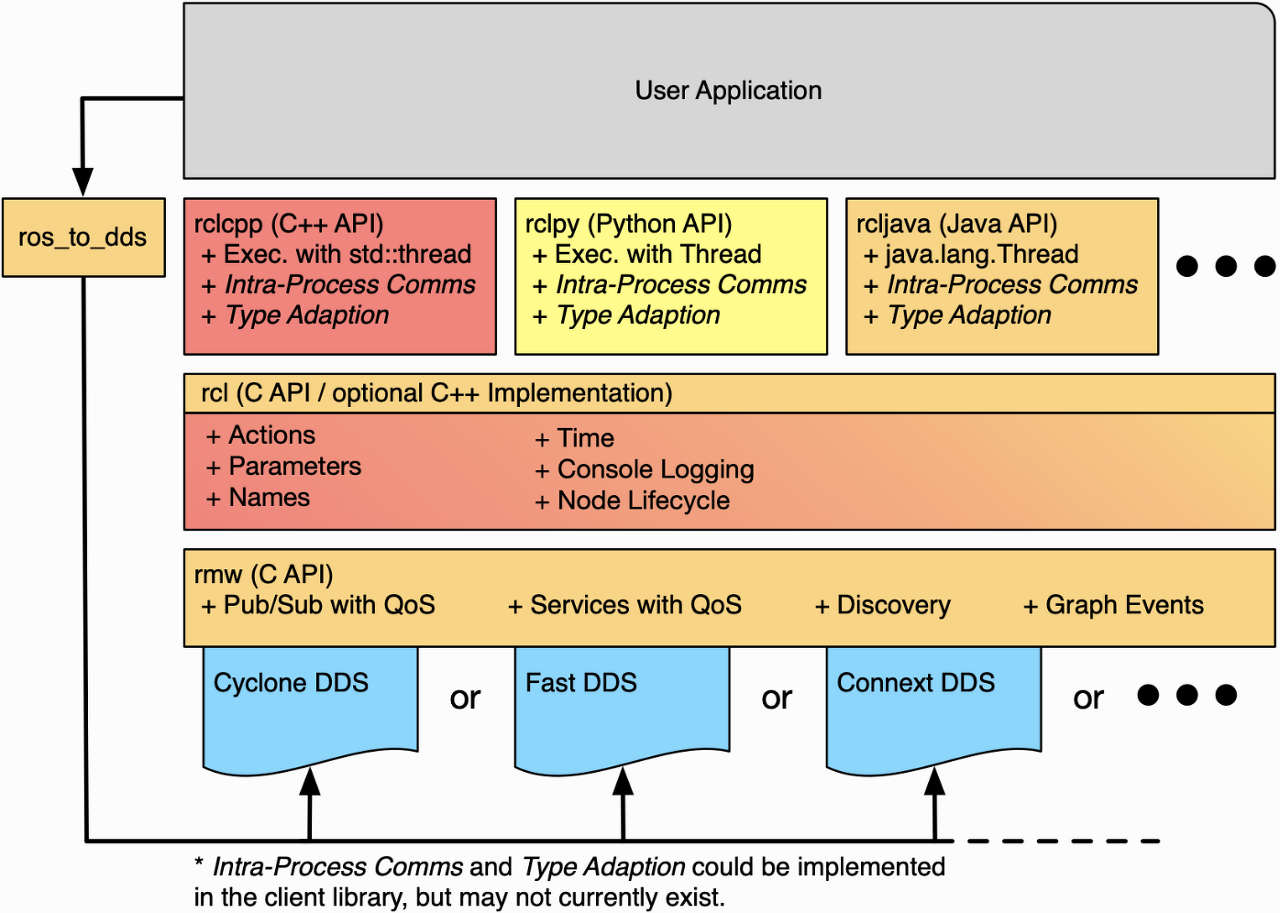
ROS2는 다른 DDS와도 통신이 가능하다. 그 이유는 RMW(Robot MiddleWare)가 RCL(Robot Client Library)와의 통신을 위해 DDS 구현에 대한 추상화 계층을 제공하기 때문이다. (DDS가 도입되면서 ROS1과 가장 크게 체감되는 차이는 QoS 라고 생각한다.)
QoS
ROS2는 노드간의 통신을 조정할 수 있는 QoS 정책을 제공하여, 안정성인 TCP, best-effort UDP등 그 사이의 무엇이든 유연하게 상황에 맞는 통신 정책을 정할 수 있다. 기본적으로 아래와 같은 설정을 지원한다.
- History
- Keep last: N개의 샘플만을 저장 (N(Depth)은 설정 가능)
- Keep all: middleware에 지정된 리소스 제한 만큼 저장
- Depth
- Keep last 정책일 때 Depth 지정
- Reliability
- Best effort: 샘플을 보내려고 시도는 하나 불안정한 네트워크 상에서 유실이 발생할 수 있음
- Reliable: 샘플의 전송을 보장함, 단 여러번 시도 할 수 있음
- Durability
- Transient local: 샘플을 수신받은 subscriber가 생성되기 전 데이터를 유지하려 함
- Volatile: 샘플을 유지하려 하지 않음
- Deadline
- Duration: Topic에서 전송되는 메시지와 후속 메시지 사이의 최대 기간
- Lifespan
- Duration: 메시지의 최대 수명, 최대 수명이 끝난 메시지는 삭제됨
- Liveliness
- Automatic: publisher가 메시지를 전송할때 lease duration 기간동안 활성 상태인 것으로 간주
- Manual by topic: publisher가 살아 있다고 수동으로 간주하는 경우 lease duration 동안 활성 상태로 간주
- Lease duration
- 게시자가 활성상태임을 나타내는 최대 기간
Compatibility
ROS에서 통신이 되지 않는다면 QoS 설정에 따라 호환성 여부를 확인해볼 필요가 있다.
https://docs.ros.org/en/humble/Concepts/Intermediate/About-Quality-of-Service-Settings.html
Quality of Service settings — ROS 2 Documentation: Humble documentation
You're reading the documentation for an older, but still supported, version of ROS 2. For information on the latest version, please have a look at Iron. Quality of Service settings ROS 2 offers a rich variety of Quality of Service (QoS) policies that allow
docs.ros.org
QoS Profile
- RMW에서 QoS 설정을 쉽게 사용할 수 있도록 가장 많이 사용하는 QoS 설정을 세트로 표현해둔다.
- 목적에 따라 Default, Sensor Data, Service, Action Status, Parameters, Parameter Events와 같이 6가지로 구분하며 Reliability, History, Depth(History Depth), Durability 를 설정한다.
| Default | Sensor Data | Service | Action | Status | Parameters | Parameters Events |
| Reliability | RELIABLE | BEST_EFFORT | RELIABLE | RELIABLE | RELIABLE | RELIABLE |
| History | KEEP_LAST | KEEP_LAST | KEEP_LAST | KEEP_LAST | KEEP_LAST | KEEP_LAST |
| Depth | 10 | 5 | 10 | 1 | 1,000 | 1,000 |
| Durability | VOLATILE | VOLATILE | VOLATILE | TRANSIENT LOCAL | VOLATILE | VOLATILE |
코드는 아래 Github 주소에서 확인 가능하다.
https://github.com/ros2/rmw/blob/humble/rmw/include/rmw/qos_profiles.h#L25
참고 사이트
DDS implementations — ROS 2 Documentation: Humble documentation
DDS implementations — ROS 2 Documentation: Humble documentation
You're reading the documentation for an older, but still supported, version of ROS 2. For information on the latest version, please have a look at Iron. DDS implementations By default, ROS 2 uses DDS as its middleware. It is compatible with multiple DDS or
docs.ros.org
About internal ROS 2 interfaces — ROS 2 Documentation: Humble documentation
About-Internal-Interfaces — ROS 2 Documentation: Humble documentation
» About-Internal-Interfaces © Copyright 2023, Open Robotics. Built with Sphinx using a theme provided by Read the Docs.
docs.ros.org
About Quality of Service settings — ROS 2 Documentation: Humble documentation
About-Quality-of-Service-Settings — ROS 2 Documentation: Humble documentation
» About-Quality-of-Service-Settings © Copyright 2023, Open Robotics. Built with Sphinx using a theme provided by Read the Docs.
docs.ros.org
'ROS' 카테고리의 다른 글
| [Nav2] AMCL(Adaptive Monte Carlo Localization) package 분석 (0) | 2024.01.09 |
|---|---|
| [ROS2] Callback group 개념 및 Deadlock 문제 해결 (1) | 2024.01.04 |
| [ROS2] Life cycle node 개념 및 Nav2 예시 살펴보기 (0) | 2024.01.04 |
| ROS1 Noetic Arduino와 Serial 통신하기 (0) | 2022.07.15 |



